Leap Motion
- Project:
- Clients:
- Technology:
- Roles:
- Wireless Robot Arm
- Internal
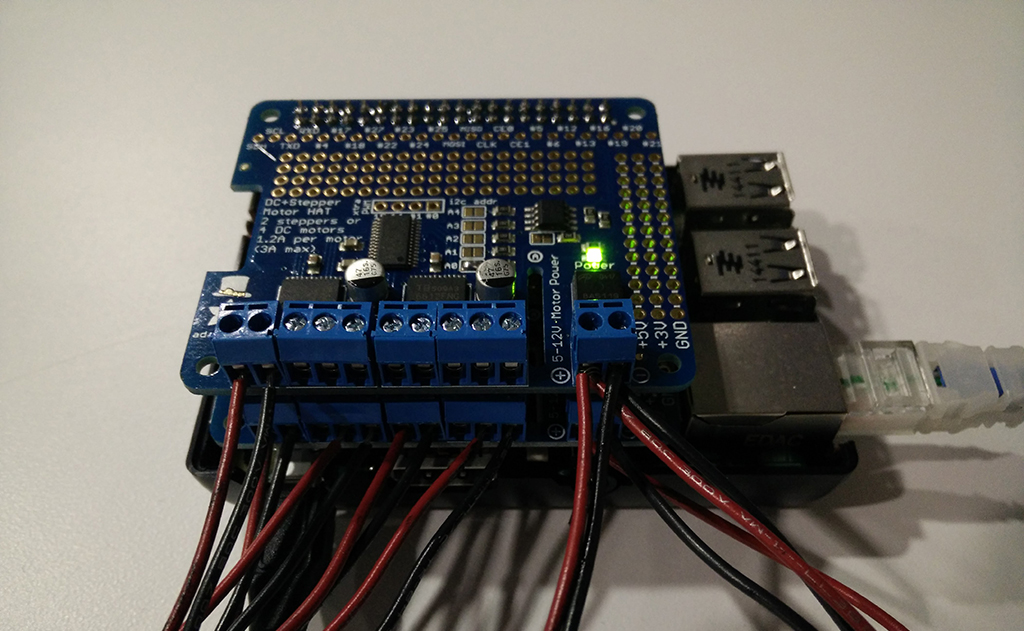
- Leap Motion, Raspberry Pi, Unity3D
- End-To-End Development
(Concept - Execution)
A Leap Motion Controller and Unity3D were used to capture the users hand gestures on a remote PC. The data was sent over the wireless network to a socket server on the Raspberry Pi that controlled 5 motors on the robot arm.